• Step 1: Separate the h-planes into two sets. One has polar angles of (-½π, ½π], the other has those of (-π, -½π]∪(½π, π].
• 将半平面分成两部分,一部分极角范围(-½π, ½π],另一部分范围(-π, -½π]∪(½π, π] 。

Step 2: Consider the set of h-planes in (-½π, ½π] (the other set should also go through step 3 and 4 similarly). Sort them by the polar angle. For the h-planes with the same polar angle, we can keep only one down (delete all others) according to the constant of these h-planes.
• 考虑(-½π, ½π]的半平面(另一个集合类似地做Step3/4),将他们极角排序。对极角相同的半平面,根据常数项保留其中之一。
• Step 3.1: Starting from two h-planes with the least polar angle, compute their intersection. Push them two into a stack.
• 从排序后极角最小两个半平面开始,求出它们的交点并且将他们压入栈。
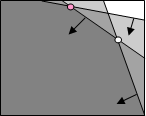
• Step 3.2: Each time, add one more h-plane by increasing order of polar angles, and calculate the intersection of it and the top h-plane in stack.
• 每次按照极角从小到大顺序增加一个半平面,算出它与栈顶半平面的交点。
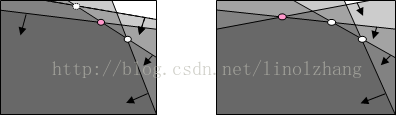
• Step 3.3: If this intersection is to the right of the intersection of top two h-planes in stack, we pop the stack once.
• 如果当前的交点在栈顶两个半平面交点的右边,出栈(pop)。
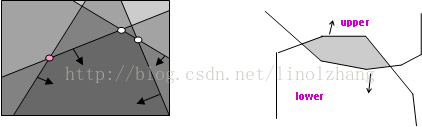
• Step 4.1: Intersections of adjacent h-plane pairs in stack form half a convex polygon. For the two sets, we have two halves – (-½π, ½π] gives an upper hull and (-π, -½π]∪(½π, π] gives a lower hull.
• 相邻半平面的交点组成半个凸多边形。我们有两个点集,(-½π, ½π]给出上半个,(-π, -½π]∪(½π, π]给出下半个。

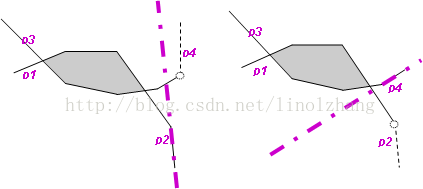
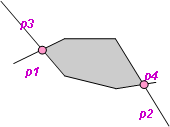
• Step 4.2: At the beginning, four pointers p1, p2, p3 and p4 indicate leftmost/rightmost edges of both upper and lower hulls.
• p1 and p3 move rightwards, while p2 and p4 walks leftwards.
• 初始时候,四个指针p1, p2, p3 and p4 指向上/下凸壳的最左最右边。
• p1, p3向右走,p2, p4向左走。

• Step 4.3: At anytime, if the leftmost intersection is against the feasible region provided by p1 or p3, we are sure the leftmost one is to be removed.
• Naturally, p1 or p3 walks rightwards to its adjacent edge.
• 任意时刻,如果最左边的交点不满足p1/p3所在半平面的限制,我们相信这个交点需要删除。
• p1或p3走向它右边的相邻边 。
• The judgment holds analogously for rightmost intersection with p2 and p4.
• 类似地我们处理最右边的交点。
• Step 4.4: Do the above removing repeatedly until there is no more update.
• 重复运作直到不再有更新出现 - 迭代。
• Everything except sorting (Step 2) in S&I algorithm remain linear – O(n) running time. Usually we use quick-sort. The total complexity is O(nlogn), with fairly small constant factor hidden.
• 除了Step2中的排序以外,S&I算法的每一步都是线性的。通常我们用快速排序实现Step2,总的时间复杂度为O(nlogn),隐蔽其中的常数因子很小。